 ROS
ROS 【ROS 2】Nav2 Keepout Zonesを使用して侵入禁止エリアを設定する
概要Nav2のKeepout Zoneを使用して、進入禁止エリアを設定する方法を記載します。Nav2ではKeepoutFilterというコストマップフィルタープラグインがあり、これを使用することで、入ってはいけない部分を指定することができる...
ROS  ROS
ROS  ROS
ROS  ROS
ROS  ROS ROS
ROS ROS 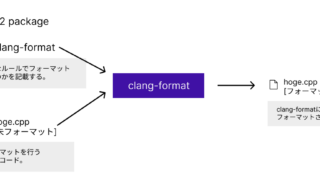 ROS
ROS  ROS ROS ROS
ROS ROS ROS