
概要
ROS1をWindows上のDockerで動作させるための方法を記載します。
ROSのバージョンは、Noeticを使用します。
今後、ROS1の概念や実際にプログラムを作成して動かす方法を解説していきます。
起動してみる
ターミナルで以下のコマンドを実行し、rosを起動するためのコンテナを起動します。
このイメージを使用することで、ブラウザ上からDockerコンテナ内をGUIで操作することができます。
docker run -p 6080:80 --shm-size 1024m tiryoh/ros-desktop-vnc:noetic
起動後、http://127.0.0.1:6080/にアクセスします。このWebブラウザにてDockerコンテナ内を操作することができます。
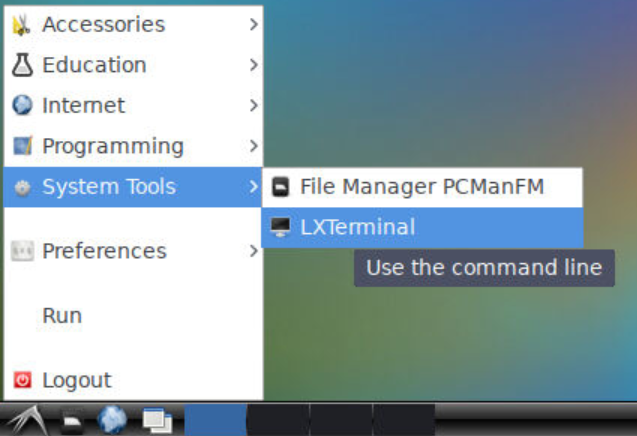
メニューのSystem Tools > LXTerminalからターミナルを開き各種ROSコマンドを実行することができます。
ROSのディストリビューションを表示するコマンドを入れてみると以下のように表示されることがわかります。
ubuntu@415f64126c9a:~$ rosversion -d noetic
これでまずは、ROS1を動かすことができました。次はROS1の基本となる概念を中心に解説していきたいと思います。


コメント