概要
Nav2のKeepout Zoneを使用して、進入禁止エリアを設定する方法を記載します。
Nav2ではKeepoutFilterというコストマップフィルタープラグインがあり、これを使用することで、入ってはいけない部分を指定することができるようになります。
参考

環境
以下の環境を前提とします。
Turtlebot3のシミュレーションについては
- ROS 2 Humble
- Turtlebot3 Burgerのシミュレーションを使用
Turtlebot3のシミュレーションについては以下を参考に環境構築をします。

使用方法
今回はチュートリアルで公開している以下のリポジトリがあるので、こちらを活用していきます。
まず、チュートリアルのリポジトリをクローンします。ワークスペースはご利用のものに置き換えてください。
cd ~/colcon_ws/src git clone https://github.com/ros-planning/navigation2_tutorials.git
パッケージをビルドします。
cd ~/colcon_ws
colcon build --symlink-install
source install/setup.bash
以下のコマンドを起動します。
cd ~/colcon_ws ros2 launch nav2_costmap_filters_demo costmap_filter_info.launch.py params_file:=src/navigation2_tutorials/nav2_costmap_filters_demo/params/keepout_params.yaml mask:=src/navigation2_tutorials/nav2_costmap_filters_demo/maps/keepout_mask.yaml
launchファイルを見てもらうとわかりますが、filter_mask_serverとcostmap_filter_info_serverの大きく2つのNodeが起動します。それぞれについて、以下で解説します。
filter_mask_server
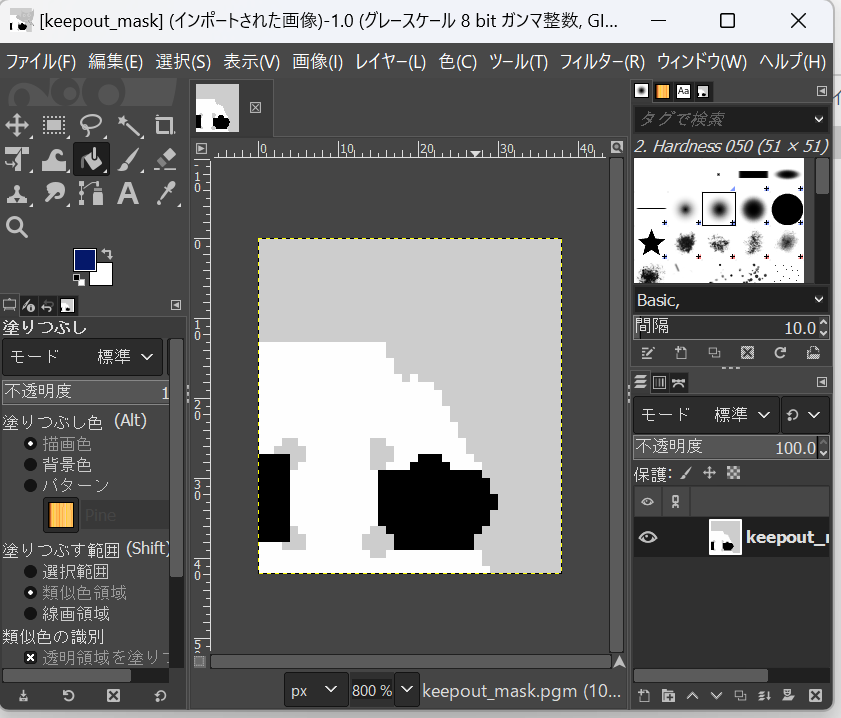
filter_mask_serverはmap_serverで、進入禁止エリアのpgmの情報を/keepout_filter_maskにパブリッシュします。侵入禁止エリアのpgmはlaunchのparamsで指定している、src/navigation2_tutorials/nav2_costmap_filters_demo/maps/keepout_mask.yamlで指定しています。
pgmは以下のようなファイルになります。黒い部分が侵入禁止エリアになる部分です。この地図は全体の地図の一部分になっています。このように一部分を指定するということもできるようになっています。
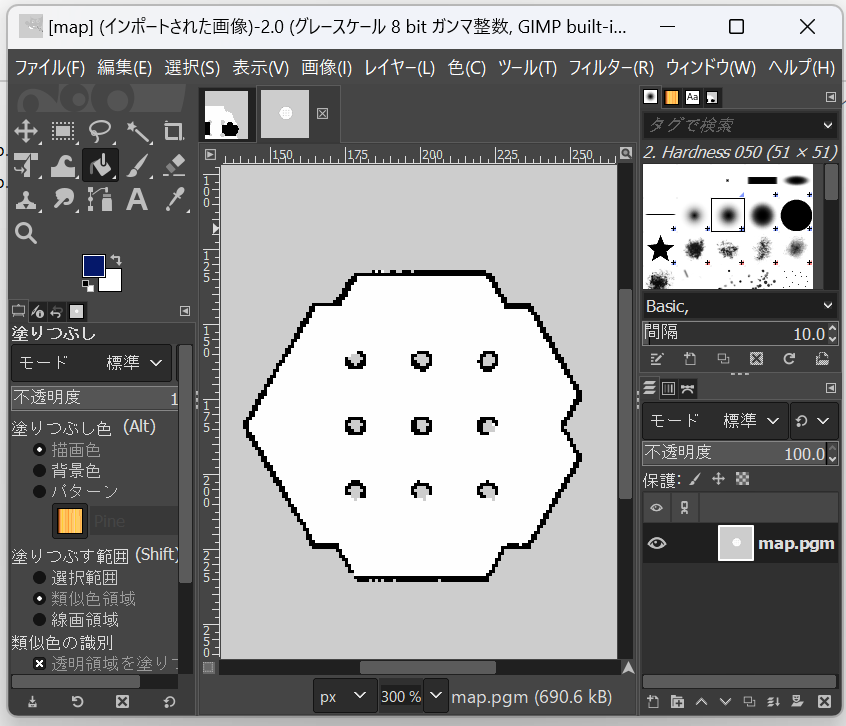
全体は以下のような地図になっています。
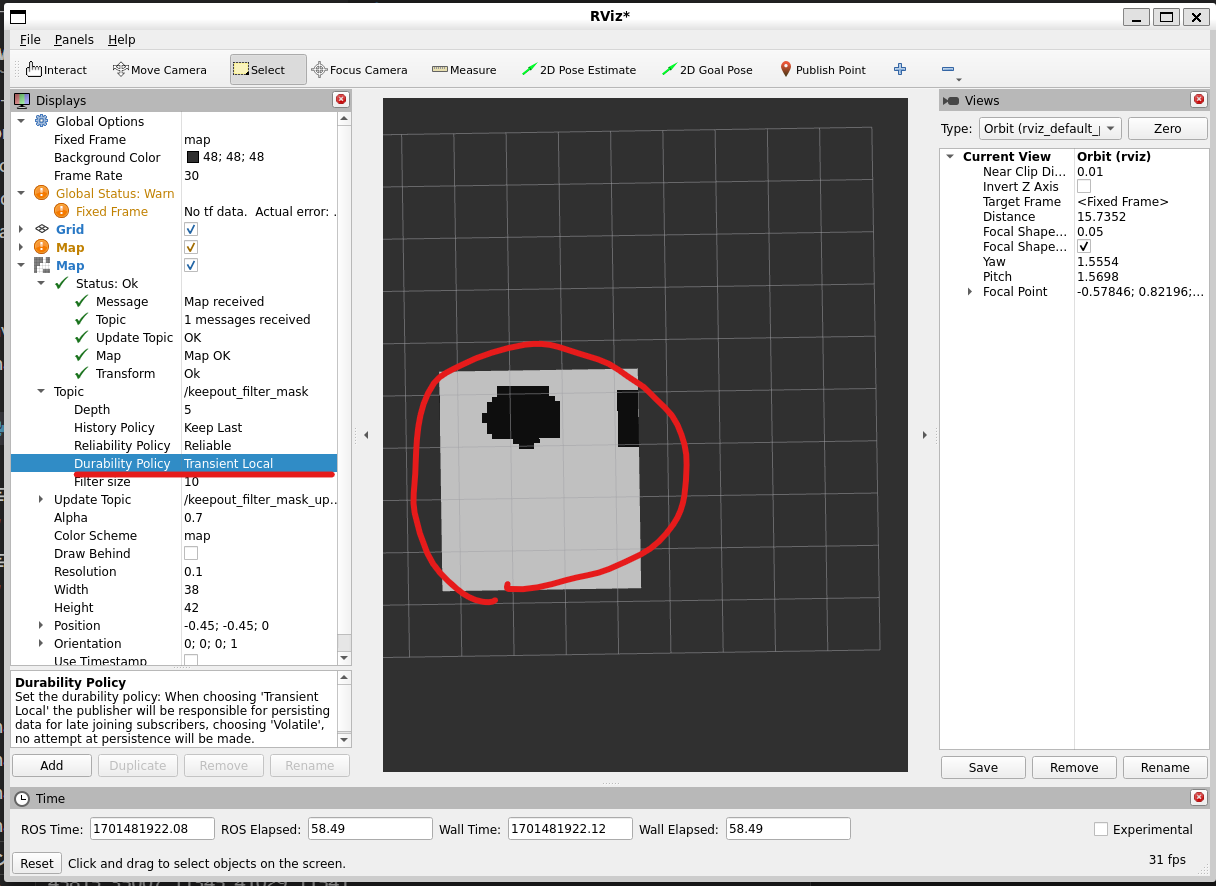
Rviz2を見ていただくとわかりますが、/keepout_filter_maskにマップがパブリッシュされていることがわかります。
costmap_filter_info_server
costmap_filter_info_serverは、この後登場するKeepoutFilterというコストマッププラグインに進入禁止に関する情報を提供するトピックをパブリッシュするノードになります。
以下のような情報がパブリッシュされます。
$ ros2 topic echo /costmap_filter_info header: stamp: sec: 0 nanosec: 0 frame_id: '' type: 0 filter_mask_topic: /keepout_filter_mask base: 0.0 multiplier: 1.0 ---
参考
ここまでのノードとトピックのグラフ表示を参考に示します。

KeepoutFilterの指定
ここまでで、チュートリアルの起動はOKですので、一度プログラムを終了しておきます。
次に、進入禁止エリアの情報を使って、Nav2で使用できるようにしていきます。これを実現するには、進入禁止用のコストマップのフィルタプラグインをグローバルコストマップとローカルコストマップに適用していきます。
以下のファイルを編集します。
/opt/ros/humble/share/turtlebot3_navigation2/param/burger.yaml
ローカルコストマップにfiltersを指定して、keepout_filterを指定します。
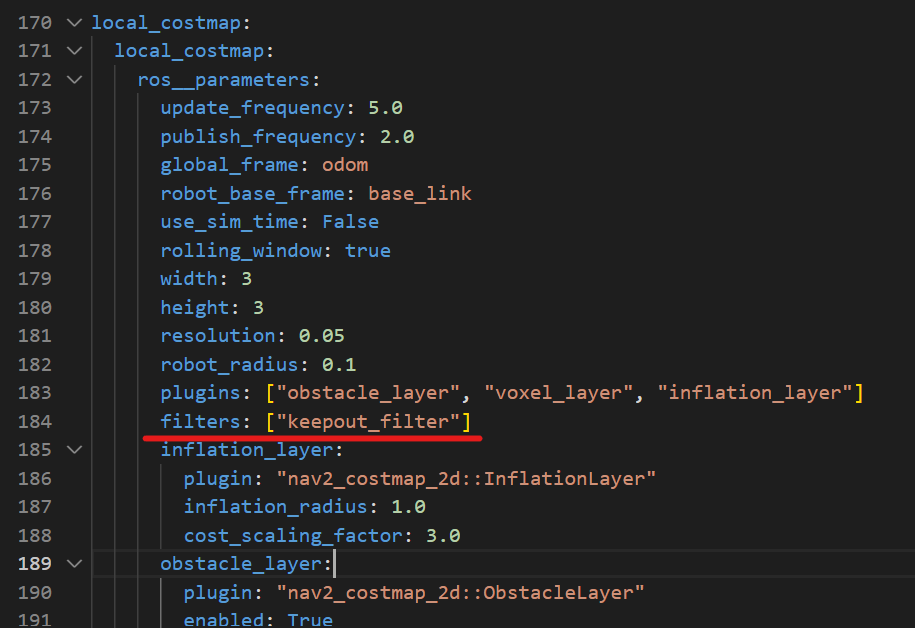
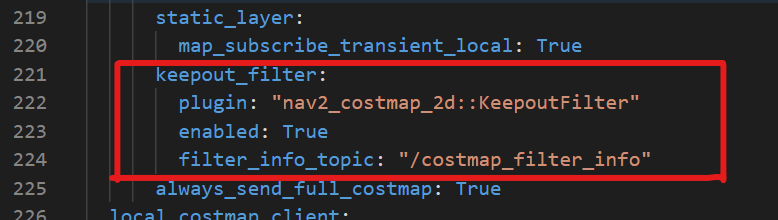
keepout_filterの指定を以下のように指定します。
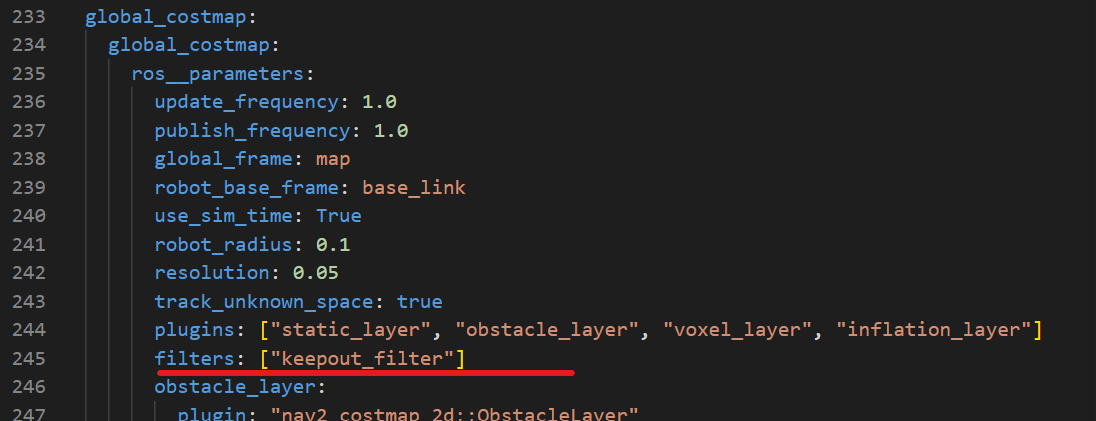
グローバルコストマップ側も同じように指定します。(keepout_filterの指定も同様に)
これで準備が完了したので、以下のコマンドでGazeboやNav2を起動していきます。
Gazeboの起動。
export TURTLEBOT3_MODEL=burger
ros2 launch turtlebot3_gazebo turtlebot3_world.launch.pyNav2の起動。
export TURTLEBOT3_MODEL=burger
ros2 launch turtlebot3_navigation2 navigation2.launch.py use_sim_time:=True進入禁止エリアのマップ情報パブリッシュ
export TURTLEBOT3_MODEL=burger
cd ~/colcon_ws
ros2 launch nav2_costmap_filters_demo costmap_filter_info.launch.py params_file:=src/navigation2_tutorials/nav2_costmap_filters_demo/params/keepout_params.yaml mask:=src/navigation2_tutorials/nav2_costmap_filters_demo/maps/keepout_mask.yamlうまくいくと、以下のようにRViz2上に進入禁止エリアのコストが反映されて、Nav2 Goalで指示すると、進入禁止エリアを避けて経路計画されます。
KeepoutFilterについての詳細は、以下にソースコードがありますので、こちらが参考になります。


コメント